I'm a second-year CS PhD student at Georgia Tech, advised by Prof. Danfei Xu, in
the Robot Learning and Reasoning Lab. I also have a undergraduate and master's degree in CS from Georgia Tech.
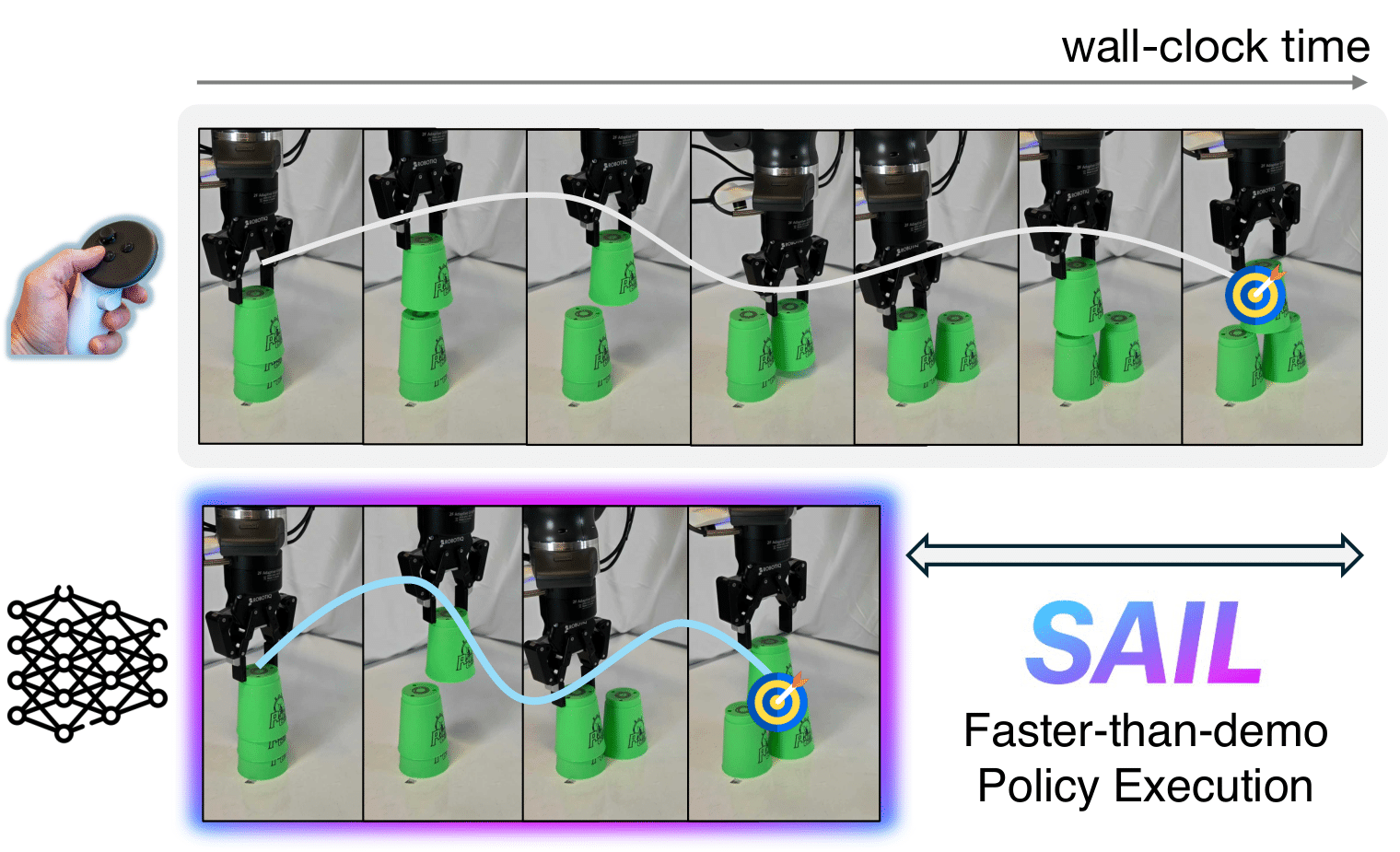
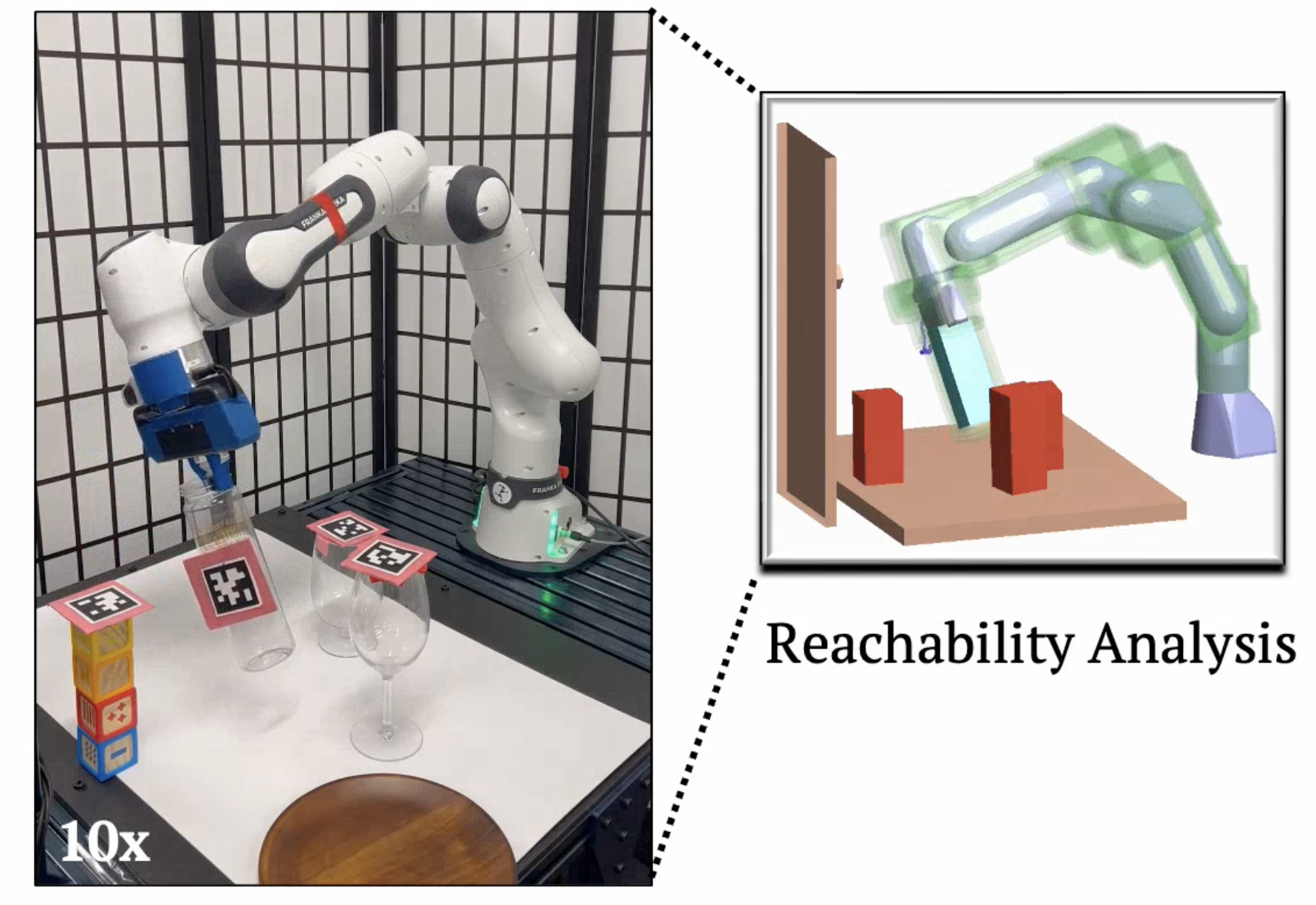
My research interests center on making robot learning feasible for industrial applications by improving accuracy, throughput and safety.
Previously, I worked at the Intelligent Sustainable Technologies Division of the Georgia Tech Research Institute on
applied robotics and virtual reality for agricultural automation.
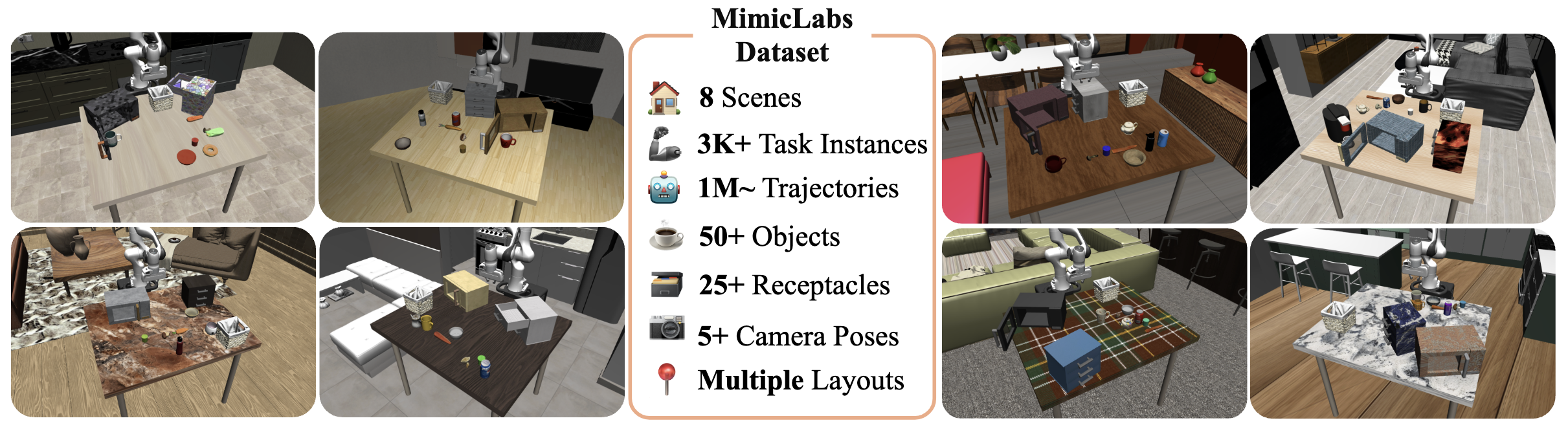
MimicLabs, a large-scale data generation framework and data composition study for imitation learning.
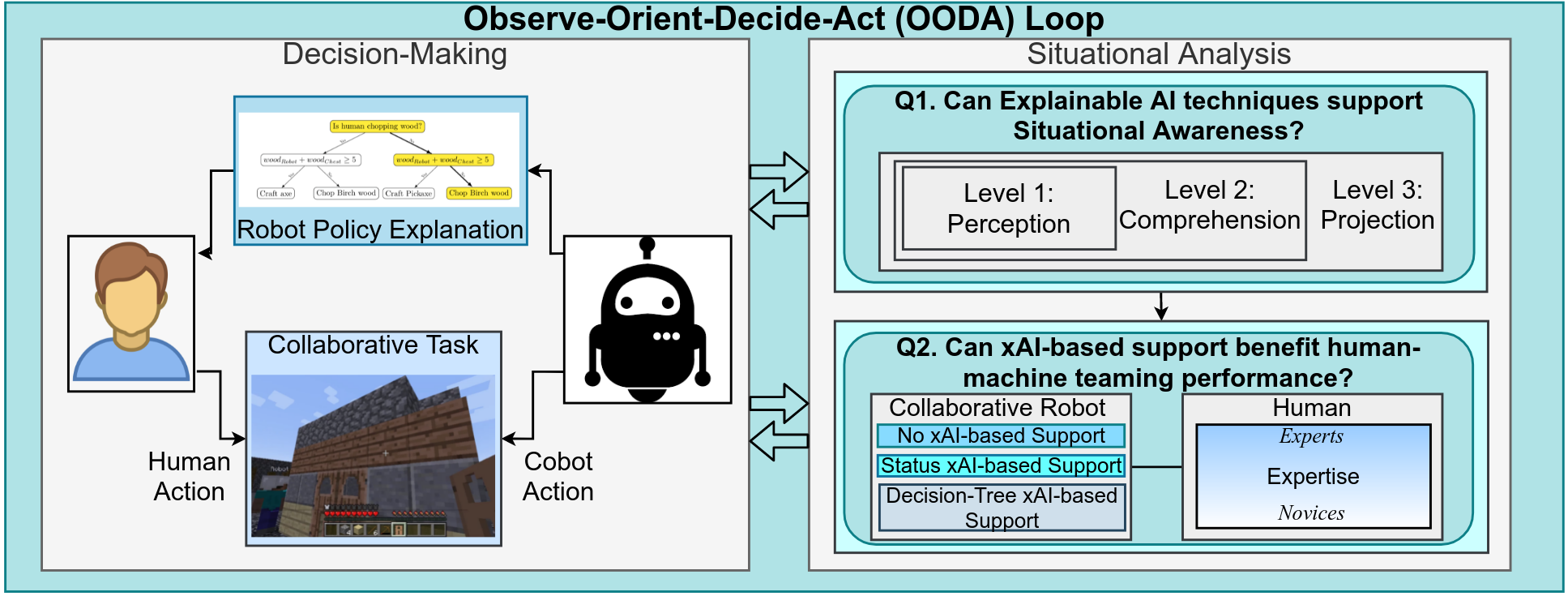
The Utility of Explainable AI in Ad Hoc Human-Machine Teaming
Rohan Paleja,
Muyleng Ghuy,
Nadun Ranawaka Arachchige,
Reed Jensen,
Matthew Gombolay NeurIPS, 2021
arXiv